As drive technology continues to advance, drive features are constantly being added by the manufacturers to both the hardware and software designs. Along with these advancements comes new terminology to describe or promote these advancements. This article defines a few of the terms that have come about in recent years and help improve the understanding of AC drives.
Active Front End – This term should be used to describe a line-side converter that provides a constant DC link voltage source to the AC drive. The AFE circuit comprises a Pulse Width Modulated (PWM) inverter on the line side of the drive as opposed to a diode rectifier that is common in most standard drives. This means that excess power can be fed back to the line supply from the DC link.
Active Infeed – This term describes an infeed that is an actively pulsed, closed-loop controlled infeed/regenerative feedback unit that is commutation failure proof and is suitable for four-quadrant operation. (I.e. for energy flow both from the line supply to the DC link as well as in the opposite direction). An active infeed unit can also actively correct the power factor.
It comprises a self-commutated IGBT inverter that employs the pulse width modulation technique and a clean power filter. The clean power filter essentially filters out the harmonics from the PWM voltage of the active infeed and ensures that an almost sinusoidal current is drawn from the supply, therefore ensuring very low harmonics.
The Active Infeed is the “top-of-the-line” infeed version for Siemens Sinamics drives.
Pulse Edge Modulation (PEM) – Most standard drives employ Pulse Width Modulation (PWM) control. However, PEM describes a modulation method used by a converter gating unit, whereby the pulses that are cut-out of the DC link voltage do not appear in a fixed grid. The edges of the output voltage generated are formed by a small number of short pulses (around the zero point), while a wide pulse is generated in the middle of each half-wave (refer to Figure 1). The result is: a high output voltage, with a rough order of magnitude of 100% of the line supply voltage, can be achieved and in turn a better motor utilization.
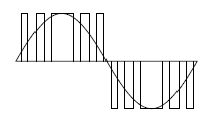
Figure 1 – PEM Voltage diagram
Duty Types – Due to the different temperature rise time constants of converters and rotating electrical machines, different definitions and notations have been adopted for their duty types. The duty types and their abbreviations for converters are specified in DIN 41756-1, for rotating electrical machines in DIN EN 60034-1. These two standards must be reviewed when planning and engineering a drive system.
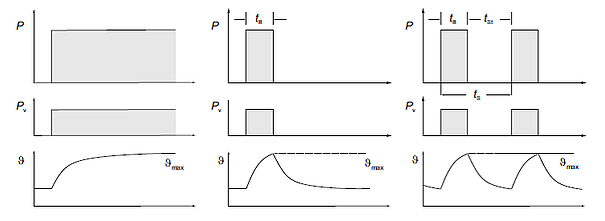
Figure 2 – Duty Types S1, S2, & S3
Overload Capability – This is the capability of a converter to supply or accept a brief overcurrent Imax that exceeds the rated current In. For this definition it is simpler to make a quantitative statement regarding the overload capability, as the overload capability can only be used for a limited time. After this time, a reduced current must flow for a minimum idle time (as a maximum, the base load current). The following diagram shows the characteristics of such a duty cycle:
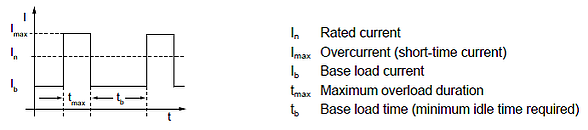
Figure 3 – Duty cycle used to define OL capability

You may also be interested in reading: