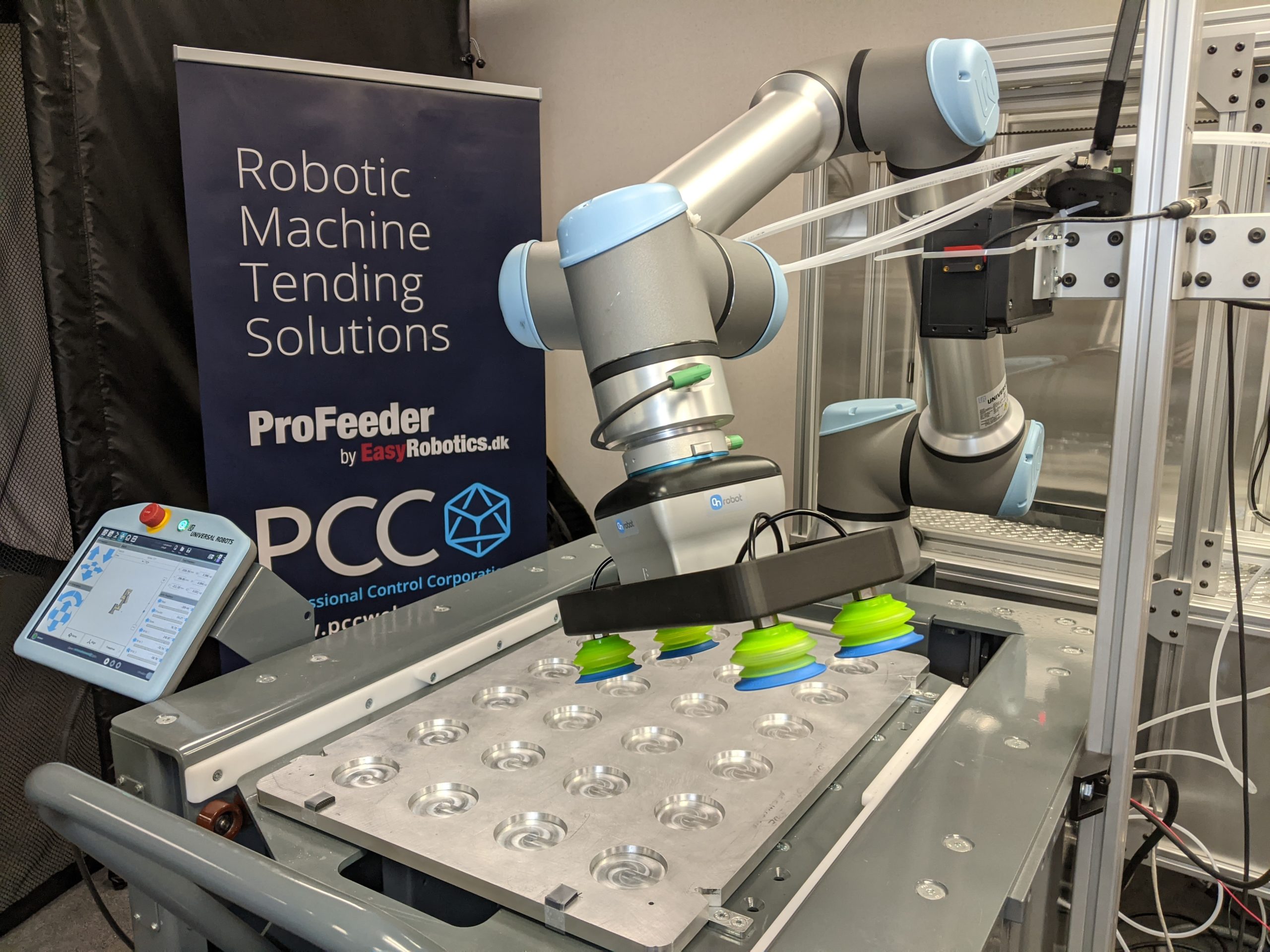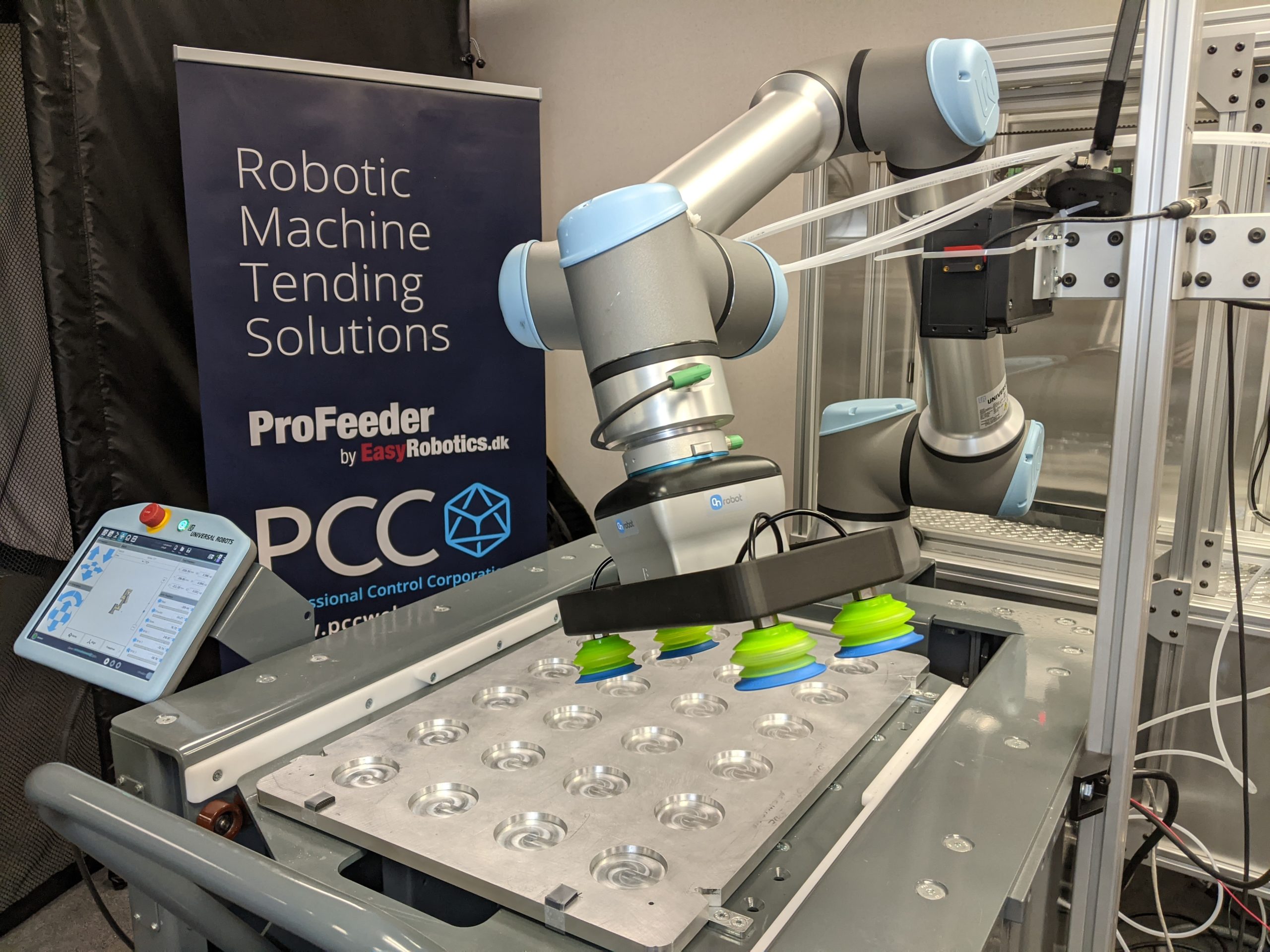

The PCC Robotics engineering team reviewed the application and considered a handful of potential solutions that would utilize standard tools in the Universal-Robots Polyscope programming environment. Working with the customer’s raw product and actual bin and bag combination, the engineering team recreated the application in the PCC Robotics Germantown, WI robot lab.
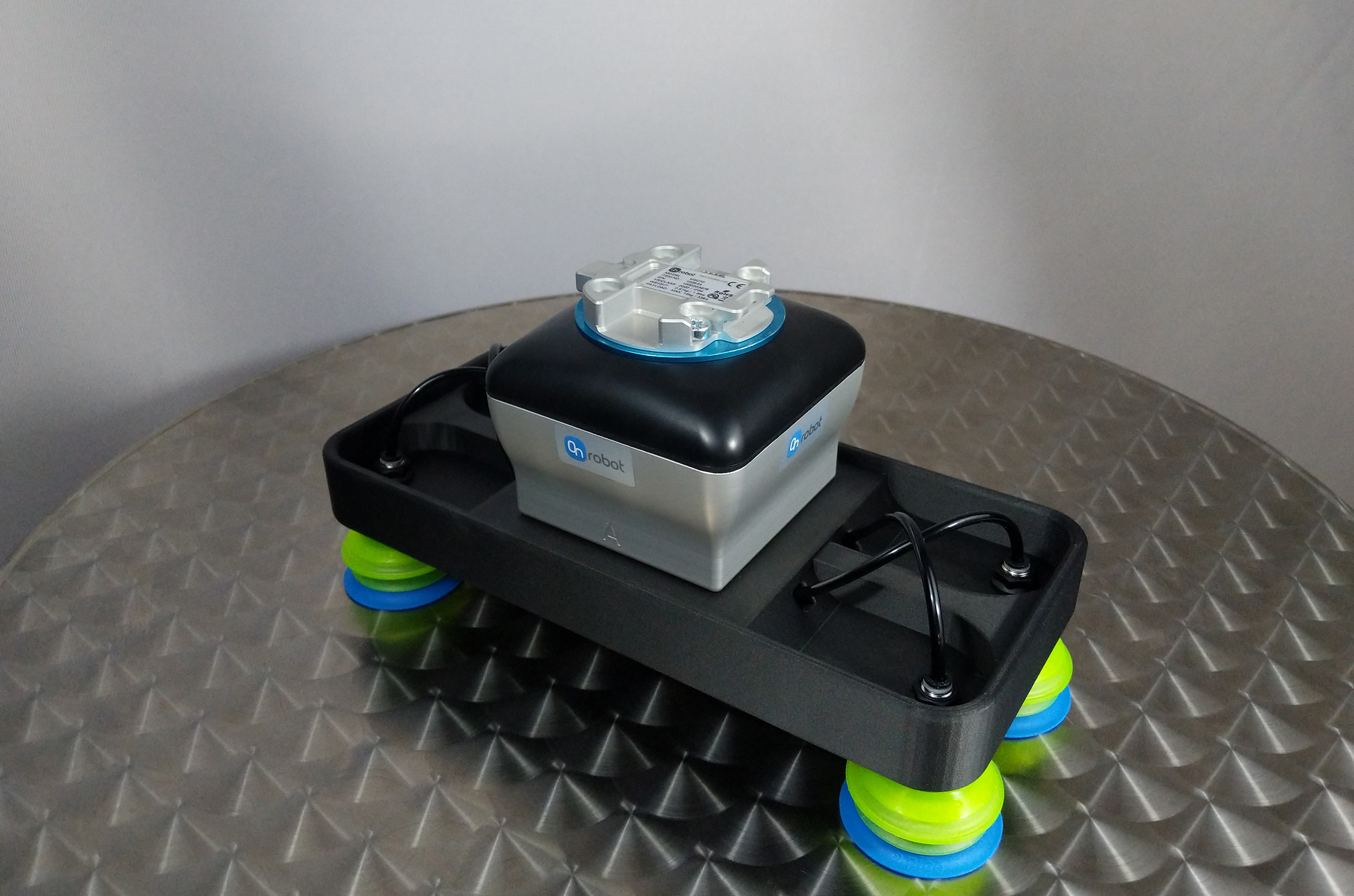
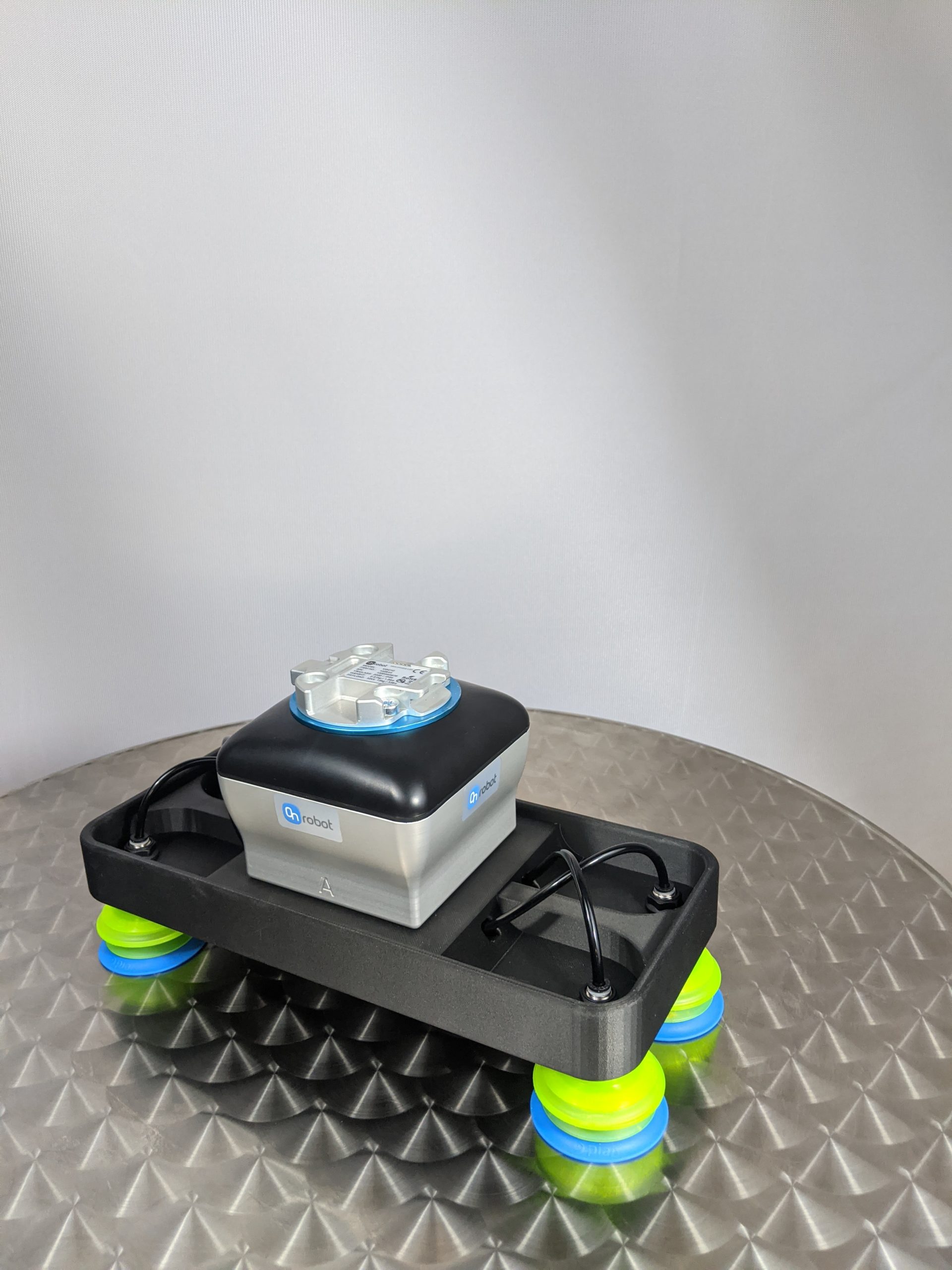
To address the gripping challenge, the engineering team utilized the customizable OnRobot intelligent vacuum gripper VGC-10. This gripper’s clever design allows for an infinite amount of customization. PCC Robotics designed a suction cup support bracket in Solidworks then 3D printed it on a Markforged Onyx One printer. FDA approved cups were added to the design as they would come in direct contact with the food product. Once the gripping solution was proven, the palletizing constraints needed to be addressed. Dan Carney, General Manager of PCC Robotics, said “One of the real challenges in working with a six-axis collaborative robot in tight spaces, is literally finding methods for the robot to get out of its own way.”
The engineering team developed and tested an uncomplicated solution where the customer approved the project for purchase – all without leaving their plant. To add to the challenge, the bulk of the development took place in the early stages of the COVID-19 outbreak in the US. The success with this kind of remote development was only possible through clear and concise communication between all parties involved. Very accurate placement of robot base, bin, and product staging were modeled and shared to assure smooth installation and commissioning.
Eventually the hardware solution was delivered to food manufacturer’s site and commissioning began. Production runs occurred in a matter of a few days and while a few programming improvements have been made since, the system was largely operational at start-up.